
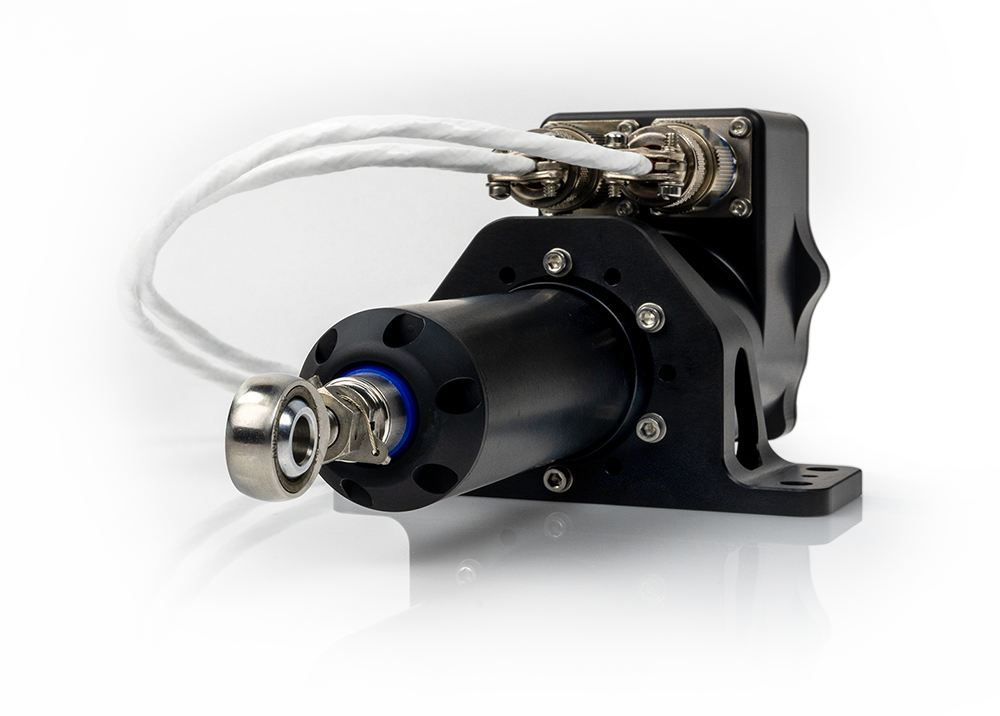
servocylinder
High Performance Linear Servo Actuator
- BLDC control electronics and contactless absolute position feedback built-in
- Control via CAN 2.0B, RS-422 serial, RC PWM, and more
- Lightweight, high power density, high bandwidth
- Ideal for harsh shock and vibration environments in the aerospace and defense industries
- 100% electrically conductive hardcoat anodized aluminum enclosure for EMI/EMC protection
- Typical applications include swashplate and tail-rotor control, fixed wing UAV control surfaces, thrust vector control of rocket engines, UGV brake and transmission control, etc.
30 Years of Underwater Heritage
- BLDC control electronics and contactless position feedback built-in
- Pressure balanced oil-filled for operation to 6000+ meters (10,000 PSI)
- Control via CAN, RS-422 serial, digital signals, and more
- Ideal for harsh maritime applications above and below the waterline
- Hydrofoils, ROV control surfaces, subsea valves, release mechanisms, USV control…
- Shallow underwater versions available for low cost subsea actuation: hydrofoils, littoral uses, USV control

Robust and Reliable for Industrial Applications
- Industrial-grade linear servo actuator
- Built-in BLDC control electronics and absolute position feedback
- Expanded control options: CAN, RS-422 serial, 4-20 mA in/out, ±10 VDC
- IP65 sealing for wet and dusty environments
- Ideal for industrial automation tasks, environmental cells, dynamometers, outdoor applications

Your Cost-Effective Solution for Precision Control
- Complete linear servo system
- Built-in BLDC control electronics and absolute position feedback
- Control options: CAN, RS-422 serial, 4-20 mA in/out, ±10 VDC
- Non-sealed, lowest cost version
- Suitable for benchtop applications, laboratory experiments, clean environments

Integrated Controller Options
| Control Modes & Features | Classic ControllerOption Code “N” | Industrial ControllerOption Code “P” | CAN ControllerOption Code “C” | Deepsea Controller Option Code “Q” |
|---|---|---|---|---|
| RS232 Serial w/ Command Line Interface (CLI) |
0
|
|||
| RS422 Serial (Full-Duplex, 4-wire) w/ Command Line Interface (CLI) |
0
|
0
|
||
| RS485 Serial (Half-Duplex, 2-wire) w/ Command Line Interface (CLI) *Does not command motion |
0
|
* | ||
| CAN 2.0B (Configurable Protocol) |
0
|
0
|
||
| CANopen (CiA DS301, CiA DS402) |
0
|
|||
| Analog Voltage (-10 V to +10 V) Control |
0
|
0
|
||
| Analog Current (4-20 mA) Control Input |
0
|
0
|
||
| Isolated Analog Current (4-20 mA) Output (Configurable Data Source) |
0
|
|||
| 1-2 ms Pulse (RC PWM) |
0
|
* | ||
| Toggle (Simple On/Off for Extend/Retract) Control |
0
|
|||
| Pre-set Position Control |
0
|
* | ||
| Isolated Digital Inputs | 2X | 1X | 3X |
0
|
| Transient Voltage Protection on Signal Lines |
0
|
0
|
0
|
|
| Deepsea Operation to 6,000 meters (10,000 PSI) *AU Series Only |
0
|
* : Contact Ultra Motion to discuss this feature.
Tech Specs
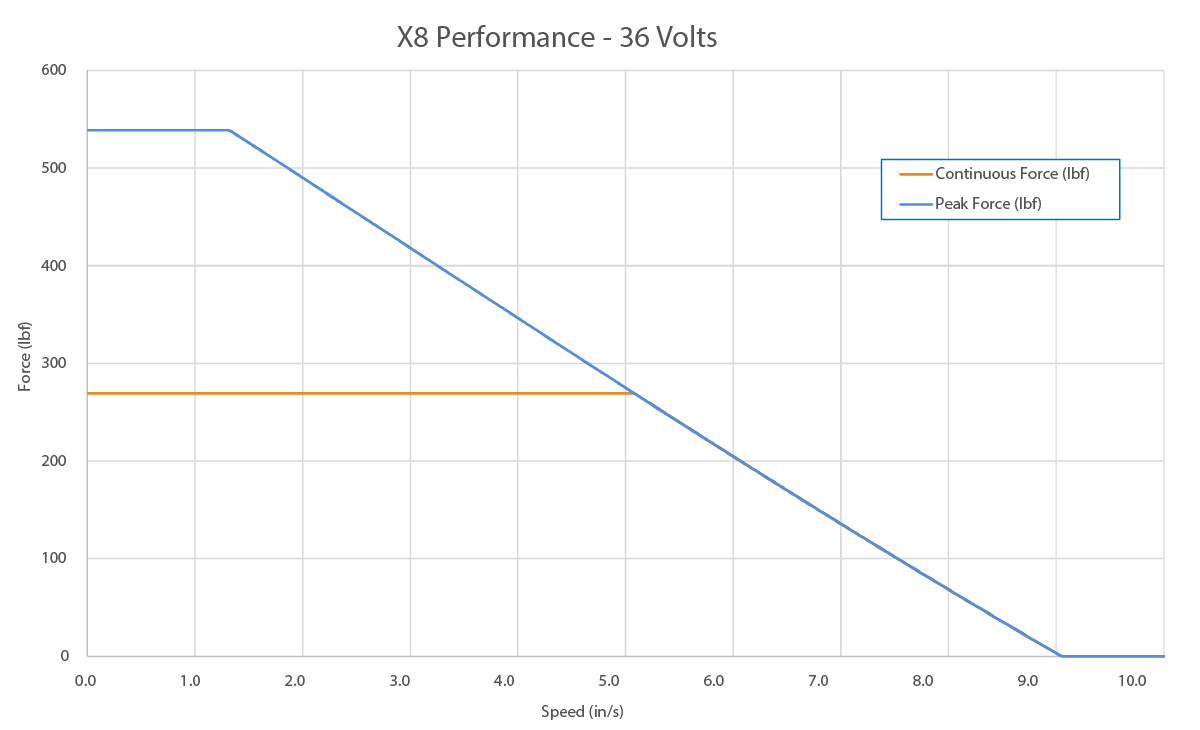
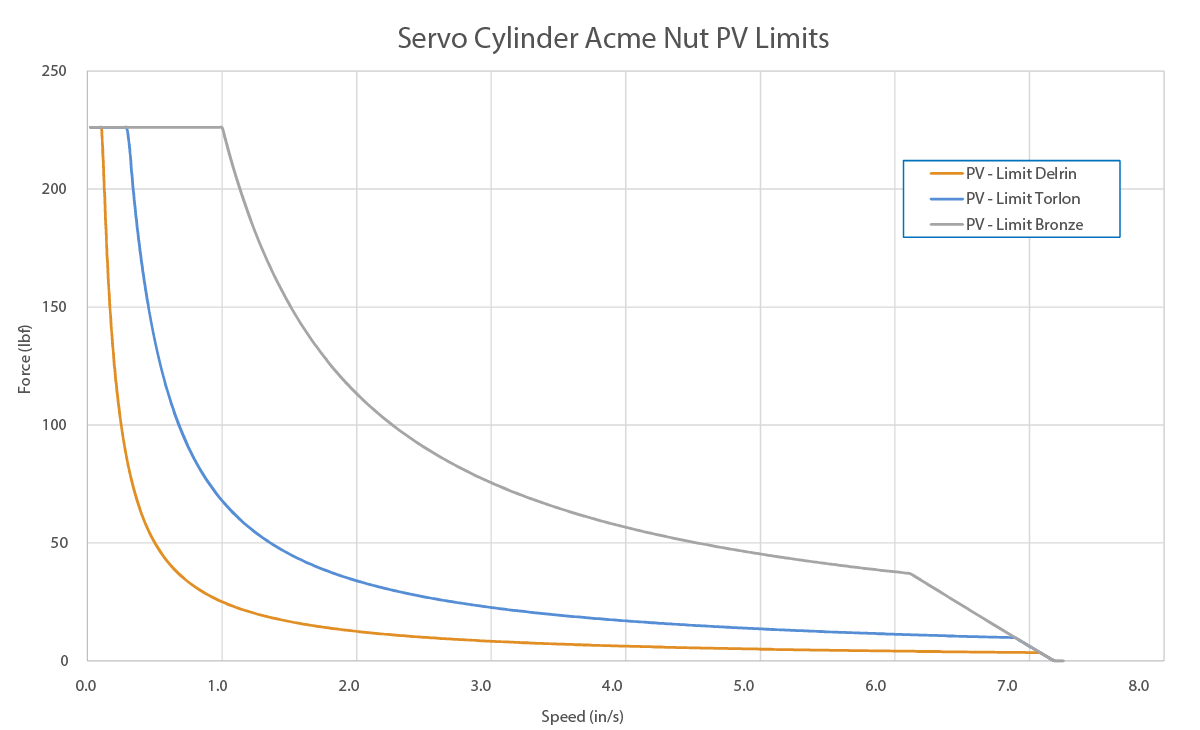
Force: Up to 270 lbf continuous, 530 lbf peak
Speed: Up to 14 in/s
Linear resolution (with acme screw): 0.000061″ (1.55 µm)
Operating Voltage Range: 8-36 VDC
Stroke Lengths: Up to 7.75”
Integrated Servo Cylinder Controller
• Advanced DSP-based motion control
• High-performance inverter stage
• High-speed Opto-Isolators
• Easy USB configuration
• Flexible GPIO with digital status or PWM output options
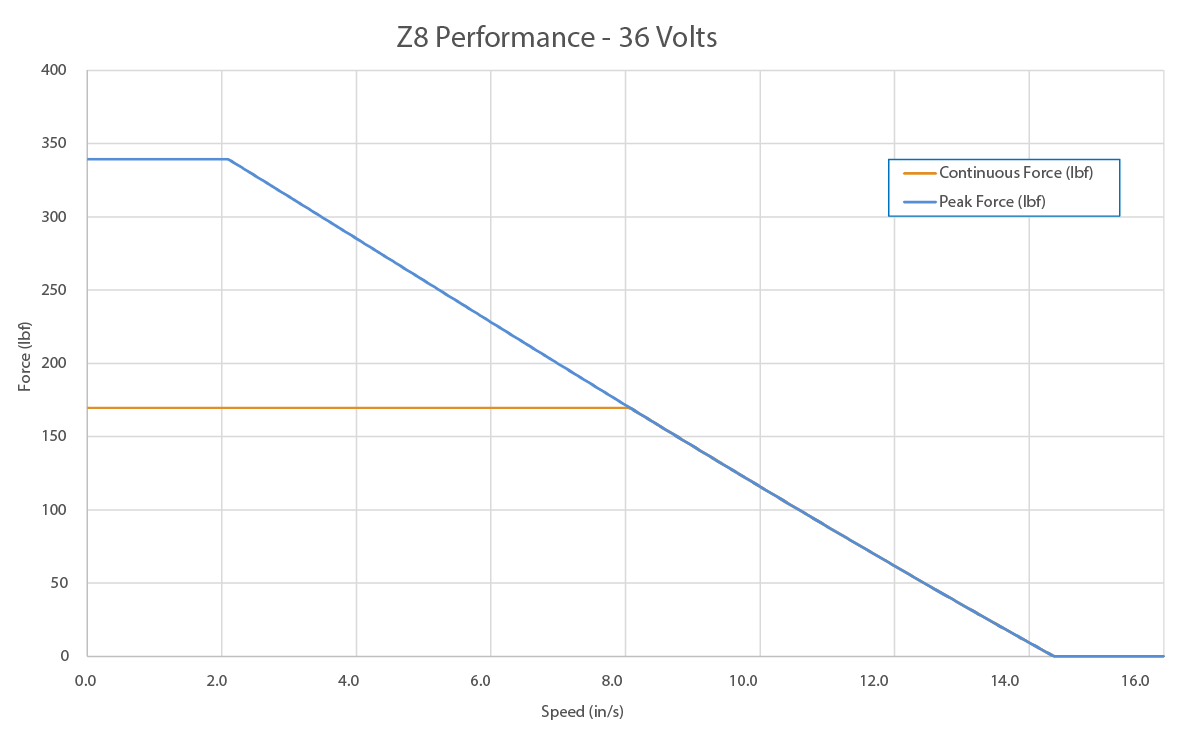
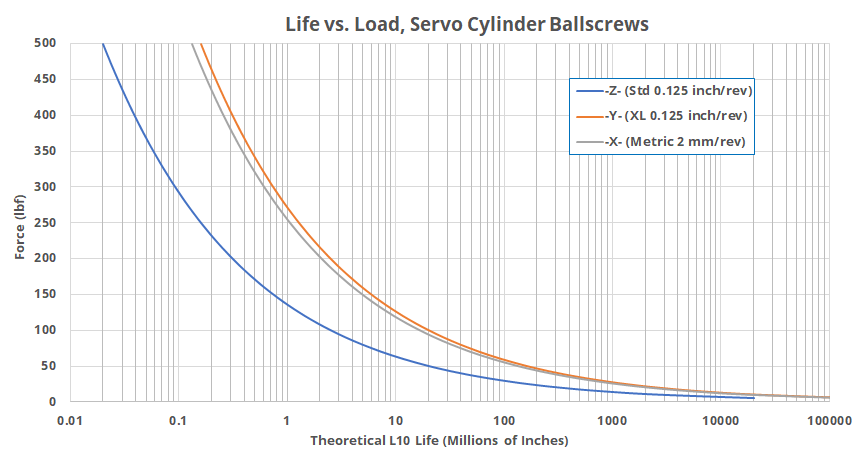
Performance
Phase Index®
How is it used?
The first commercial implementation of Ultra Motion’s Phase Index® position sensor technology, used in a demanding aerospace application, has performed flawlessly through extensive and rigorous environmental testing and field operations. Ultra Motion is now adapting this proven sensor technology to a range of designs from high-performance, high-power-density aircraft actuators, to low-cost industrial motion control. Phase Index® actuator position sensing technology is available exclusively from Ultra Motion, so contact our engineers to find out how it can work for your application.

How Does it work?
The Phase Index® position sensor works by using the phase relationship between two cyclic signals with different periods to determine absolute position within a larger interference cycle of the combined signals. When implemented with state-of-the-art magnetic sensor technology, this technique allows for a high-speed, high-resolution, digital actuator position sensor that is always accurate and that works across a range of harsh environmental conditions.
Operating Modes
Command Line Interface
Available on Classic, Industrial and CANopen* ControllersThe Servo Cylinder has a serial command line interface (CLI) that offers the user complete control over all performance parameters, motion commands*, and diagnostic information.
- Classic Controller (Option Code N): Full Duplex RS-232
- Industrial Controller (Option Code P): Full Duplex RS-422
- CANopen Controller (Option Code C): Half Duplex RS-485
The Servo Cylinder can be controlled through a terminal program such as PuTTY, a PLC, or any program that can control a serial communication port such as LabVIEW, MATLAB, Python, etc. The Servo Cylinder can be configured to operate in “Human mode” where detailed information regarding commands and asynchronous error messages are output to the terminal window. The Servo Cylinder can also be set to operate in “Machine Mode” where asynchronous messages are turned off, checksums are sent to ensure communication integrity, and communication bandwidth can be greatly increased. *Motion cannot be commanded via serial with the CANopen Controller
Proportional Modes
Available on Classic and Industrial Controllers*The Industrial Controller includes a configurable isolated 4-20 mA output for easy integration with analog PLCs. *1-2 ms Pulse Mode is available only on the Classic Controller. Proportional modes take full advantage of the benefits that the integrated Phase Index® absolute position sensor has to offer. The user simply supplies a signal proportional to the desired position, and the Servo Cylinder immediately responds. There is no homing required so the user does not have to worry about intermittent power interruptions causing downtime or failure of their machine due to loss of position. Software definable end-of-stroke limits eliminate the need for limit switches. The user simply configures the stroke range, and the corresponding proportional input signal range, and the Servo Cylinder is ready to use.
Voltage Mode Example Configurations
| Voltage Min | Voltage Max | Position Min | Position Max |
|---|---|---|---|
| -10V | +10V | Full Retract | Full Extend |
| 0V | +5V | 2.000″ | 3.125″ |
| -5V | +5V | Full Retract | 1.500″ |
Current Mode Example Configurations
| Current Min | Current Max | Position Min | Position Max |
|---|---|---|---|
| 4 mA | 20 mA | Full Retract | Full Extend |
| 4 mA | 16 mA | 2.000″ | 3.125″ |
| 10 mA | 20 mA | Full Retract | 1.500″ |
1-2 ms Pulse Mode Example Configurations
| Pulse Min | Pulse Max | Position Min | Position Max |
|---|---|---|---|
| 1 ms | 2 ms | Full Retract | Full Extend |
| 1.2 ms | 1.8 ms | 2.000″ | 3.125″ |
| 1.5 ms | 2 ms | Mid Stroke | Full Extend |
CAN Mode
Available on CAN ControllerThe CAN controller has firmware options for either a simplified CAN 2.0B compatible protocol that can be configured for use in a wide range of systems, or CANopen per CiA DS301/DS402 with support for cyclic synchronous position and profile position modes. The CAN controller has a half-duplex RS-485 serial connection for diagnostics, configuration, and field updating of the firmware.
Incremental Modes
Available on Classic ControllerIncremental input modes allow for many users to realize the benefits of the Servo Cylinder without upgrading their existing control system or PLCs. The Servo Cylinder will provide high performance BLDC actuation using the following as position commands:
- Step & Direction
- CW/CCW
- Quadrature Signals
As with all operating modes, there is no homing required. The absolute position of the actuator can be read via the RS-232 Command Line Interface, or output as a 1 kHz PWM waveform from one of the Servo Cylinder’s output pins. Software definable end-of-stroke limits eliminate the need for limit switches. This mode allows the Servo Cylinder to behave as a drop-in replacement to stepper motor systems while providing higher efficiency, increased torque at high speeds, no lost steps or stalling, and smoother operation in an integrated package. The configurable GPIO can output a PWM signal proportional to the absolute position of the Servo Cylinder, or the absolute position can be read directly over serial, eliminating the need for homing and external absolute position sensors. Two high speed optically isolated digital inputs reject noise and provide robust communication between PLCs and the Servo Cylinder.
Toggle Mode
Available on Classic ControllerThe Servo Cylinder mimics the simplicity of a brushed DC control system with the added performance benefits of a high efficiency, long life BLDC motor. The actuator immediately responds to a user supplied extend/retract signal sent to the optically isolated digital inputs. The absolute position capability of the Servo Cylinder eliminates the need for external limit switches and also allows for user configurable acceleration and max velocity for smooth, controlled motion. Speed or Torque can be controlled by using one of the Servo Cylinder’s analog inputs.
Preset Positions
Available on Classic ControllerFour Preset position mode provides the user with an easy way to perform a variety of positioning tasks. The user selects one of four pre-configured position by toggling the state of the two optically isolated digital inputs (00,01,10,11), causing the actuator to move to the selected position using the Servo Cylinder’s built-in trajectory generator. Homing is not required, which increases the ease of integration into machines and reduces complexity. A user defined input filter is available to reject noise and debounce mechanical switches.
Integrated Controller Options
| Control Modes & Features | Classic ControllerOption Code “N” | Industrial ControllerOption Code “P” | CAN ControllerOption Code “C” | Deepsea Controller Option Code “Q” |
|---|---|---|---|---|
| RS232 Serial w/ Command Line Interface (CLI) |
0
|
|||
| RS422 Serial (Full-Duplex, 4-wire) w/ Command Line Interface (CLI) |
0
|
0
|
||
| RS485 Serial (Half-Duplex, 2-wire) w/ Command Line Interface (CLI) *Does not command motion |
0
|
* | ||
| CAN 2.0B (Configurable Protocol) |
0
|
0
|
||
| CANopen (CiA DS301, CiA DS402) |
0
|
|||
| Analog Voltage (-10 V to +10 V) Control |
0
|
0
|
||
| Analog Current (4-20 mA) Control Input |
0
|
0
|
||
| Isolated Analog Current (4-20 mA) Output (Configurable Data Source) |
0
|
|||
| 1-2 ms Pulse (RC PWM) |
0
|
* | ||
| Toggle (Simple On/Off for Extend/Retract) Control |
0
|
|||
| Pre-set Position Control |
0
|
* | ||
| Isolated Digital Inputs | 2X | 1X | 3X |
0
|
| Transient Voltage Protection on Signal Lines |
0
|
0
|
0
|
|
| Deepsea Operation to 6,000 meters (10,000 PSI) *AU Series Only |
0
|
* : Contact Ultra Motion to discuss this feature.
Downloads
Product Spec Sheet
Manuals
Quick Start Guides
Reference Guides
Tools
Video
Quality Control
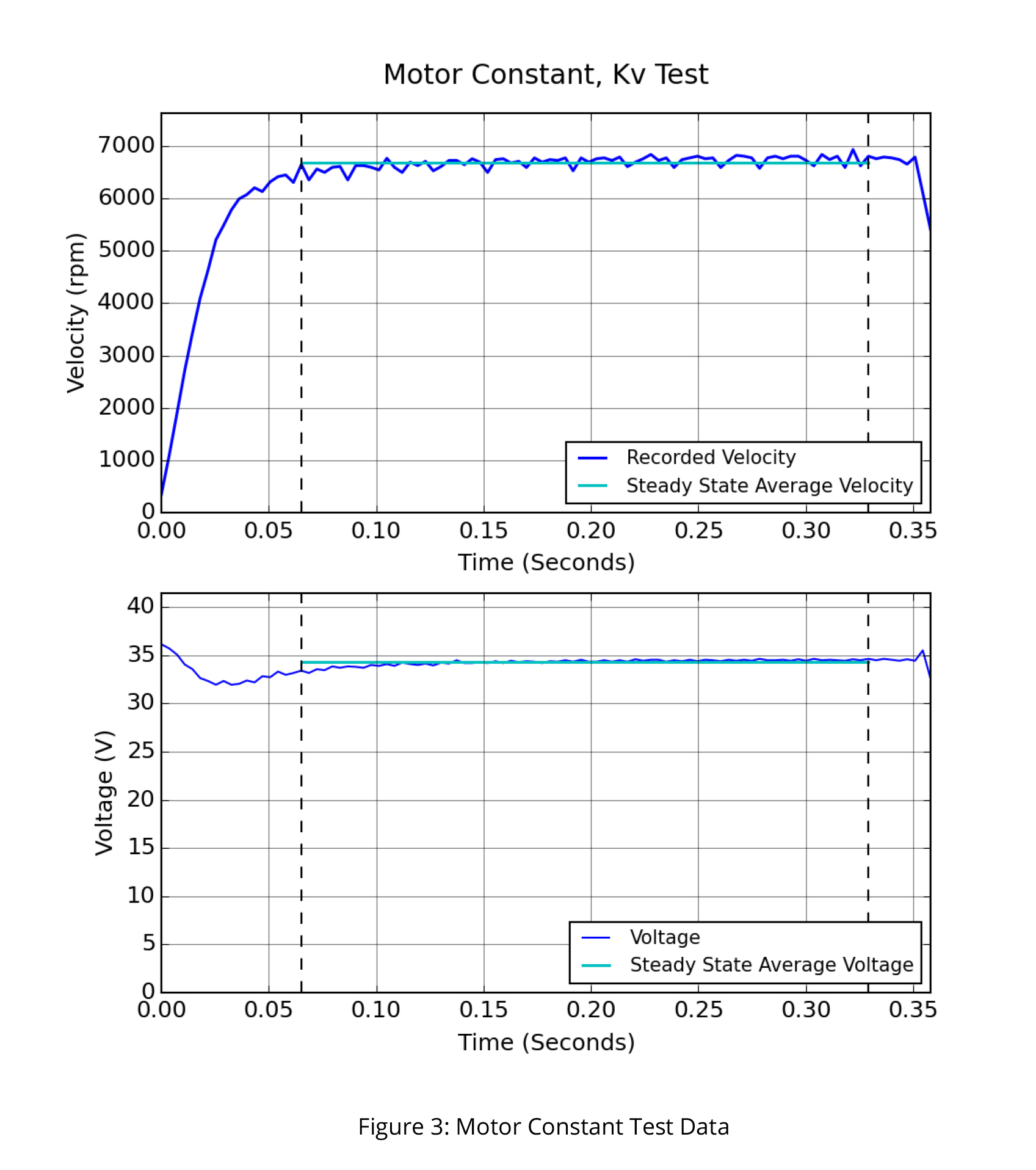
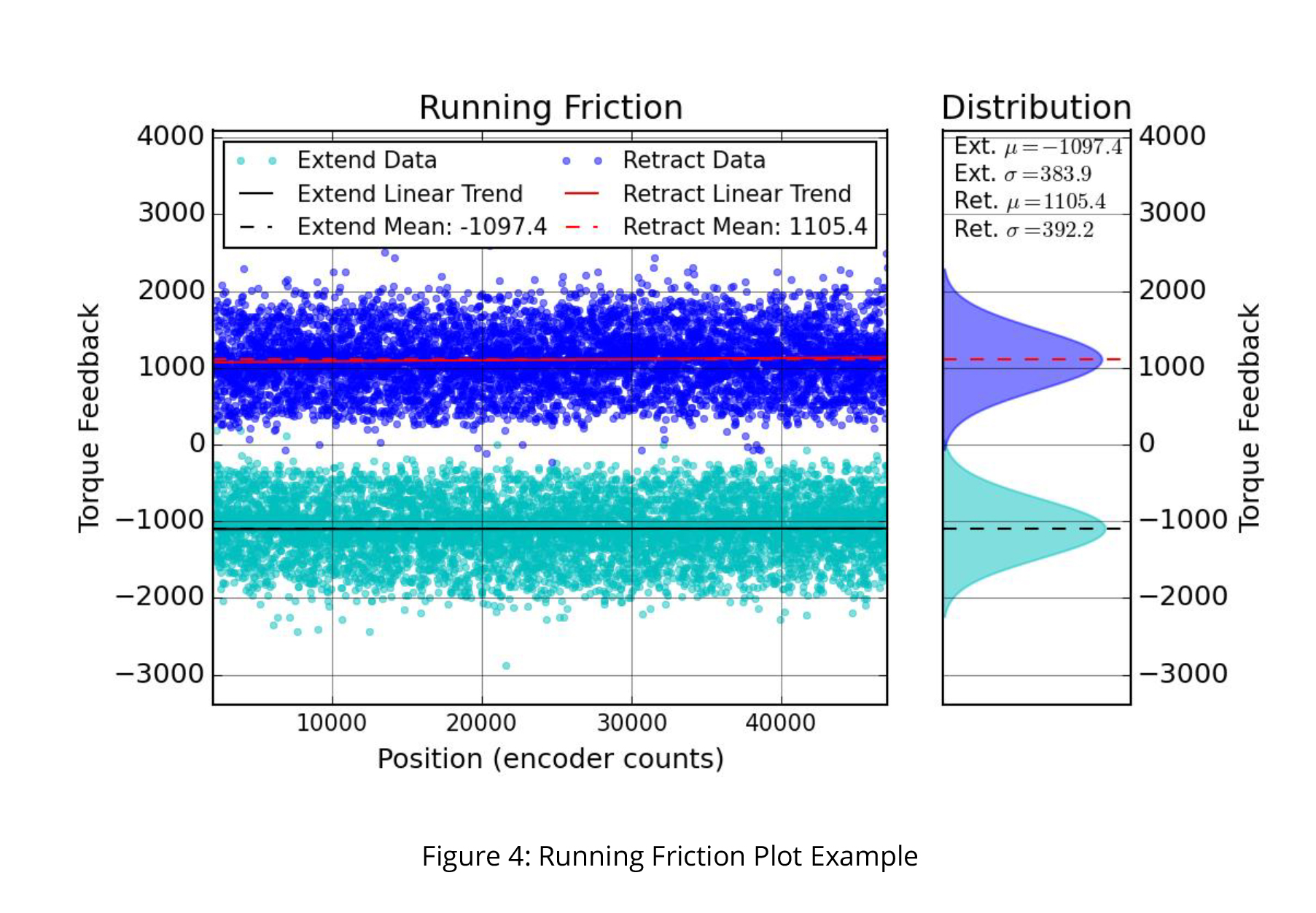
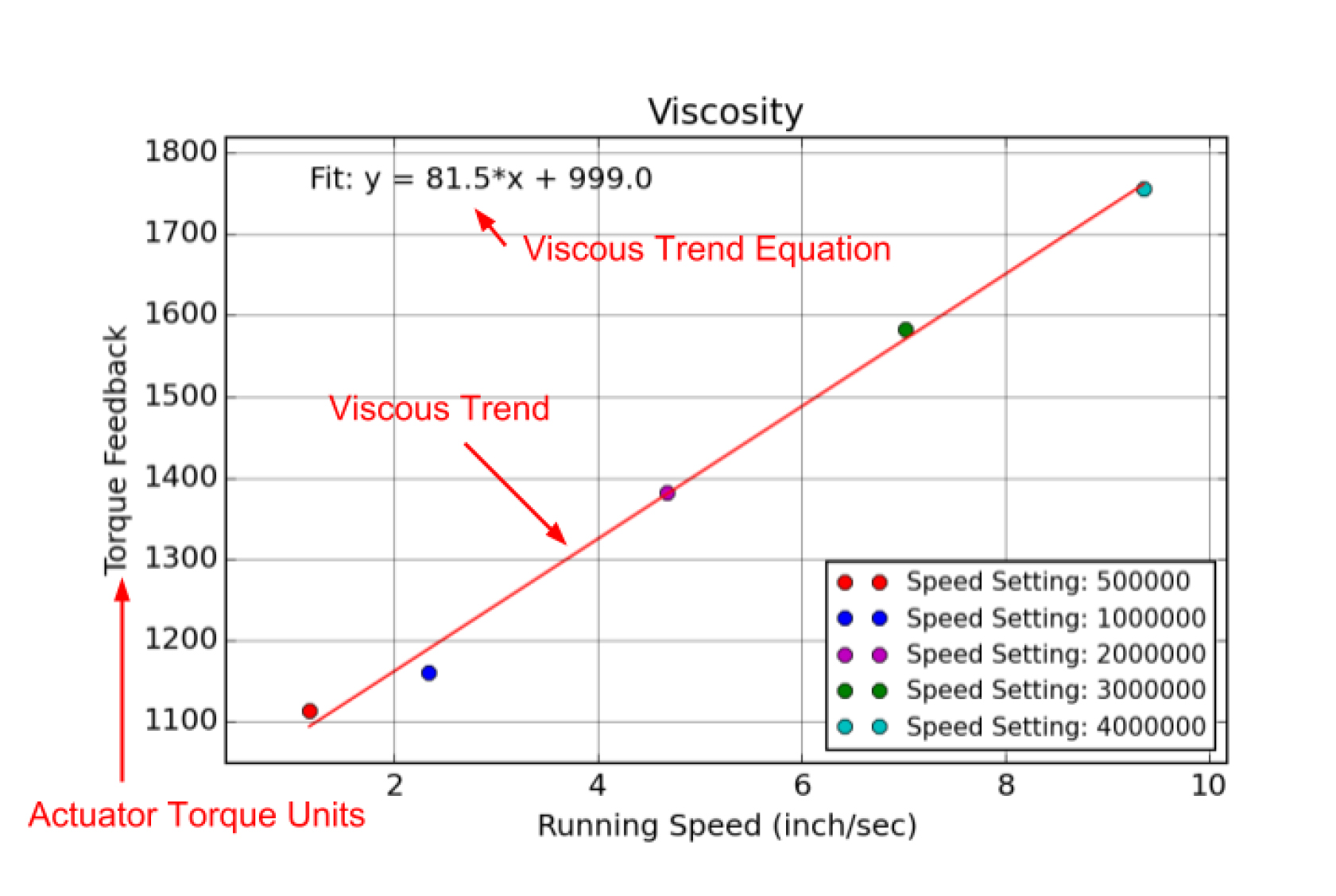
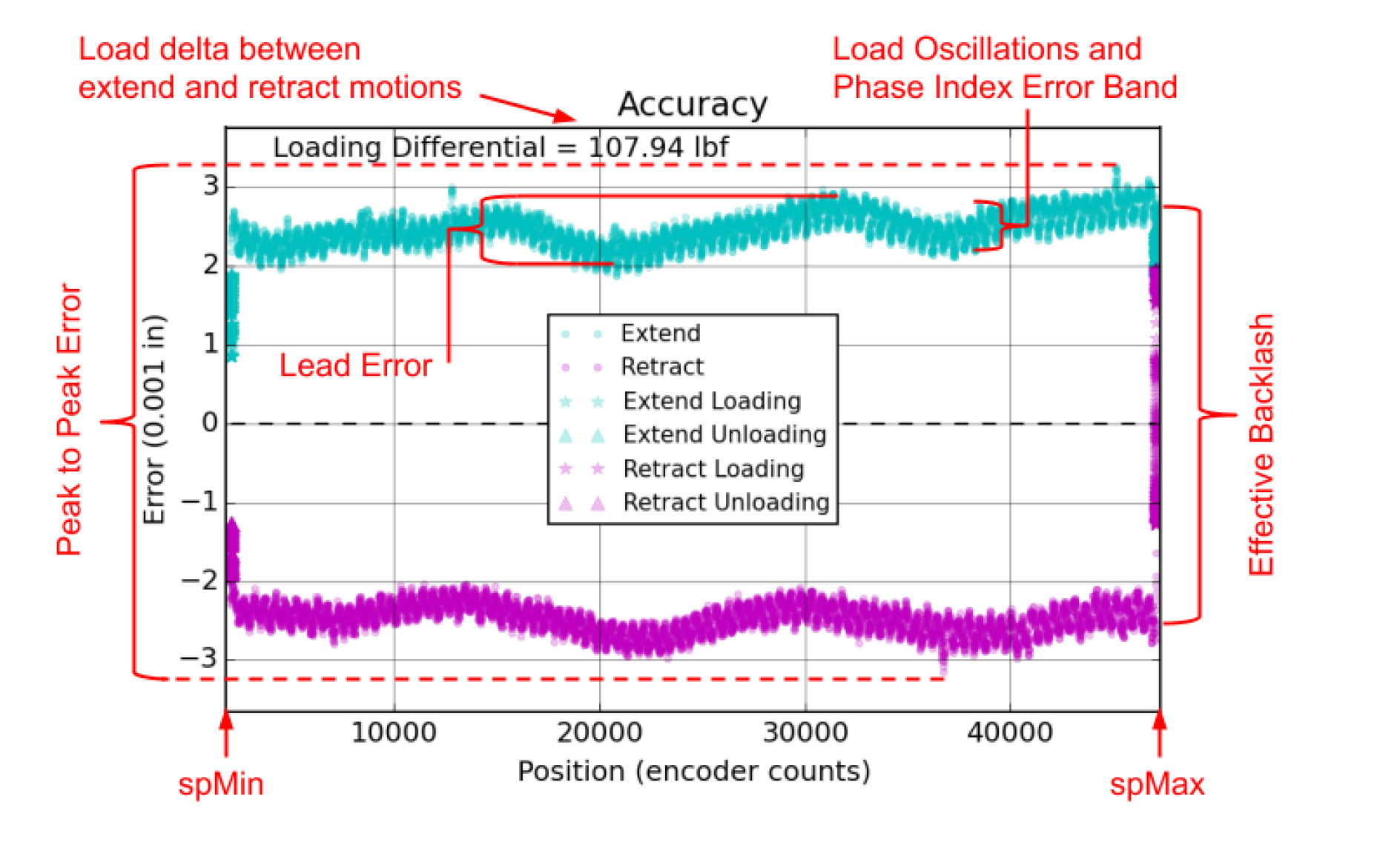
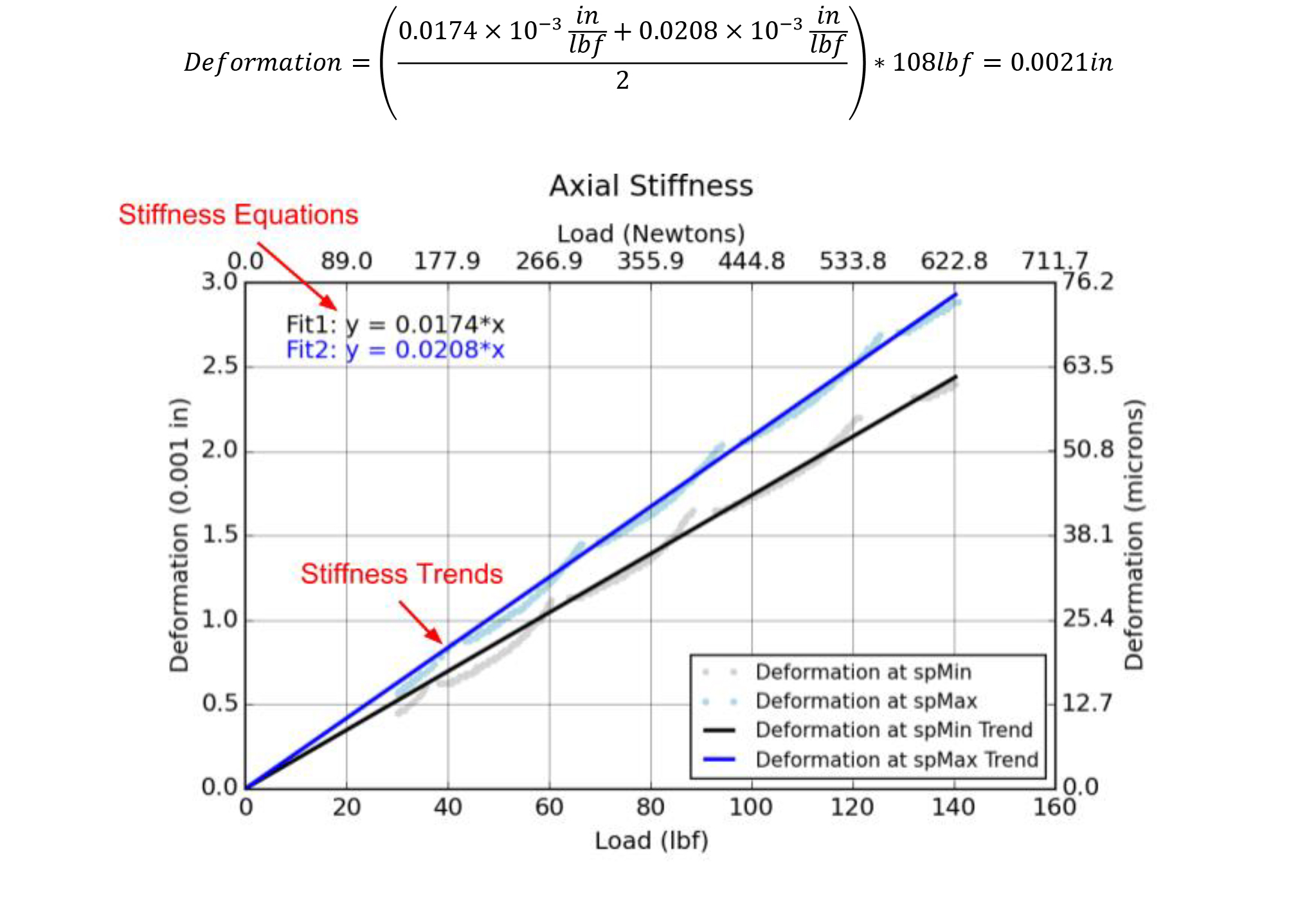
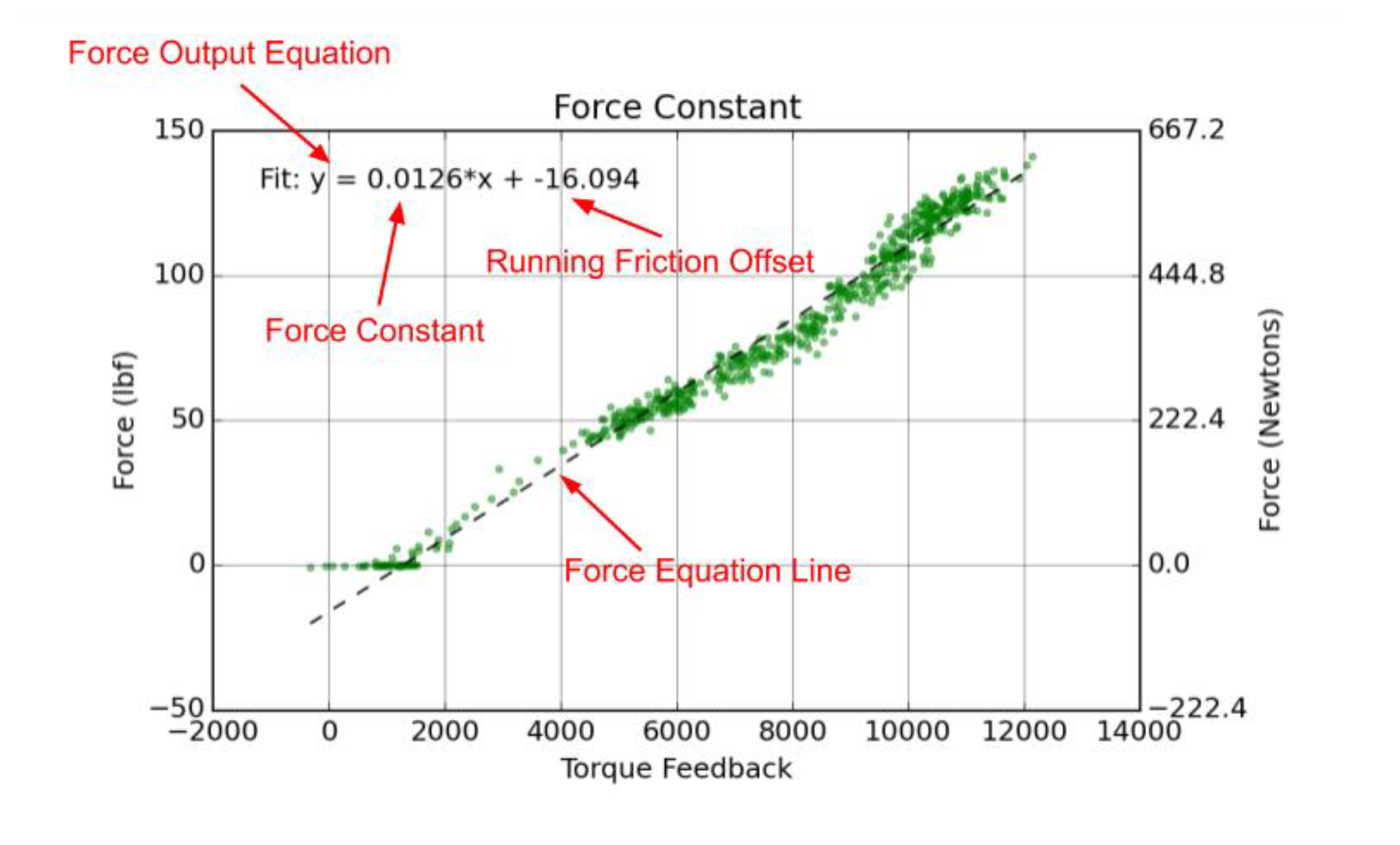
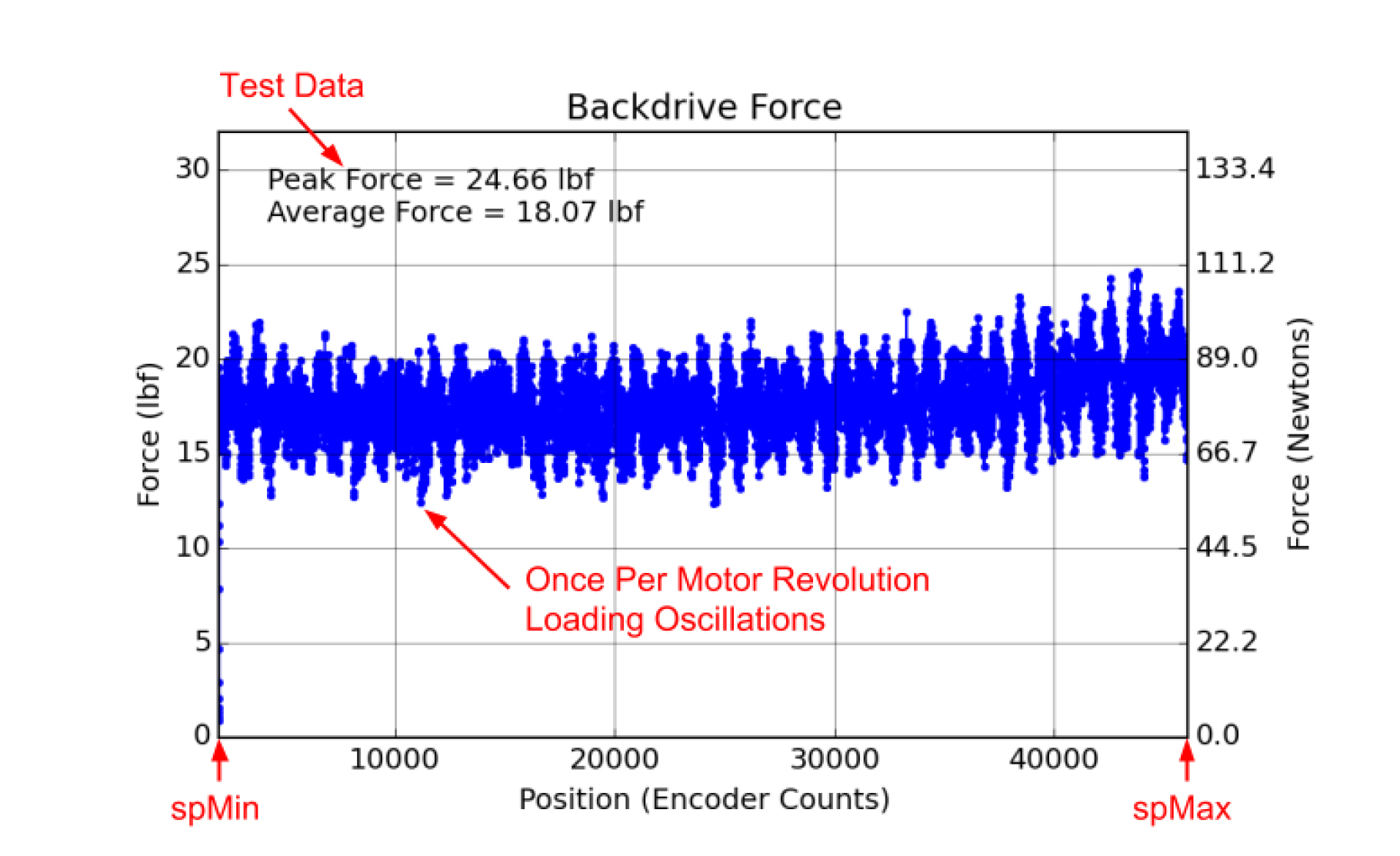
Each Servo Cylinder equipped with an -N- or -P- controller undergoes thorough acceptance testing on an automated fixture before being shipped to a customer. The specialized test fixture is equipped with a Servo Cylinder to apply loads to the test unit, an external optical strip encoder, and a load cell.
The following sections and downloadable PDF document provide detailed information regarding the acceptance test procedure. This is provided to help the user understand how to apply the test results to their application and to better understand the Servo Cylinder’s capabilities.

 Ultra Mo
Ultra Mo







