New CAN Protocol For Servo Cylinder
Ultra Motion has released a new general-purpose CAN protocol for the Servo Cylinder that can be configured for use in a wide range of systems from commercial autopilots or J1939 systems to python test setups or microcontrollers. This simple to implement protocol leverages the networkability and extremely reliable hardware layers of CAN to create robust motion control solutions. Ultra Motion’s CAN protocol is highly configurable which makes it compatible with a variety of off-the-shelf autopilots and J1939 systems.
ADVANTAGES

Aside from the simplified wiring of CAN compared to typical RC PWM control systems, this CAN protocol allows for detailed logging of actuator telemetry like real-time position, current, bus voltage, temperature, and status for preventative maintenance, post-flight analysis, and real-time control adjustments.
AVAILABILITY

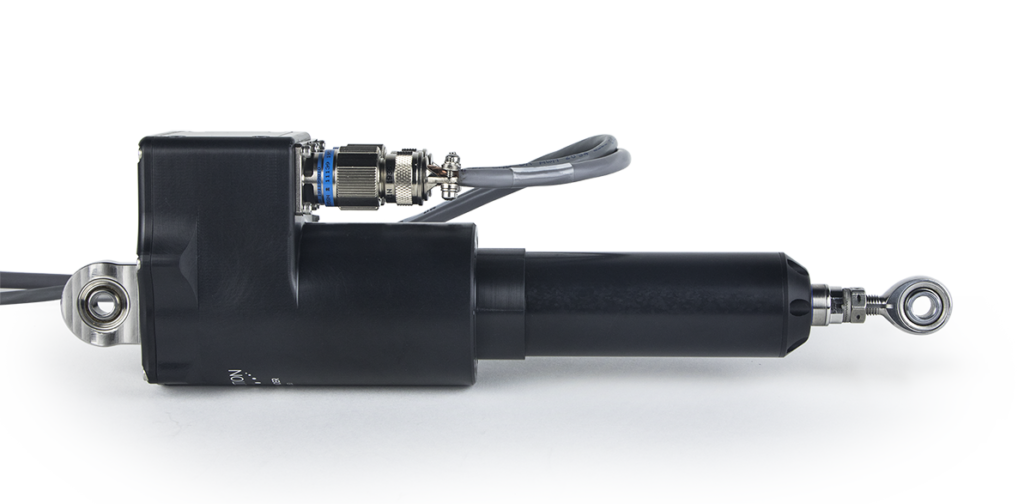
This new CAN functionality is available on all models including our submersible (Series AU) and shock/vibration hardened (Series AM) Servo Cylinders, so we can offer a solution to your most challenging environments.
CONTACT
Contact Ultra Motion Engineering for more information on this new protocol or to review your application requirements in detail.